
Цифровой Драйвер шагового двигателя DM556 2 фазный контроллер для NEMA17 NEMA23 NEMA34 5 6 А 57
1 126,62 руб.



Новое поступление
Характеристики
*Текущая стоимость 3 068,11 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-19-2026 | 3651.91 руб. | 3834.55 руб. | 3742.5 руб. |
| Feb-19-2026 | 3620.11 руб. | 3801.40 руб. | 3710.5 руб. |
| Jan-19-2026 | 3037.53 руб. | 3189.8 руб. | 3113 руб. |
| Dec-19-2025 | 3559.88 руб. | 3737.45 руб. | 3648 руб. |
| Nov-19-2025 | 3099.52 руб. | 3254.44 руб. | 3176.5 руб. |
| Oct-19-2025 | 3498.12 руб. | 3673.0 руб. | 3585.5 руб. |
| Sep-19-2025 | 3467.44 руб. | 3640.38 руб. | 3553.5 руб. |
| Aug-19-2025 | 3436.21 руб. | 3608.89 руб. | 3522 руб. |
| Jul-19-2025 | 3405.70 руб. | 3575.38 руб. | 3490 руб. |
Описание товара






Программное обеспечение:
//drive.google.com/file/d/1pBmd_SefoOcnhQ7D-EoR2GFpuRpGWPDA/view?usp=sharing
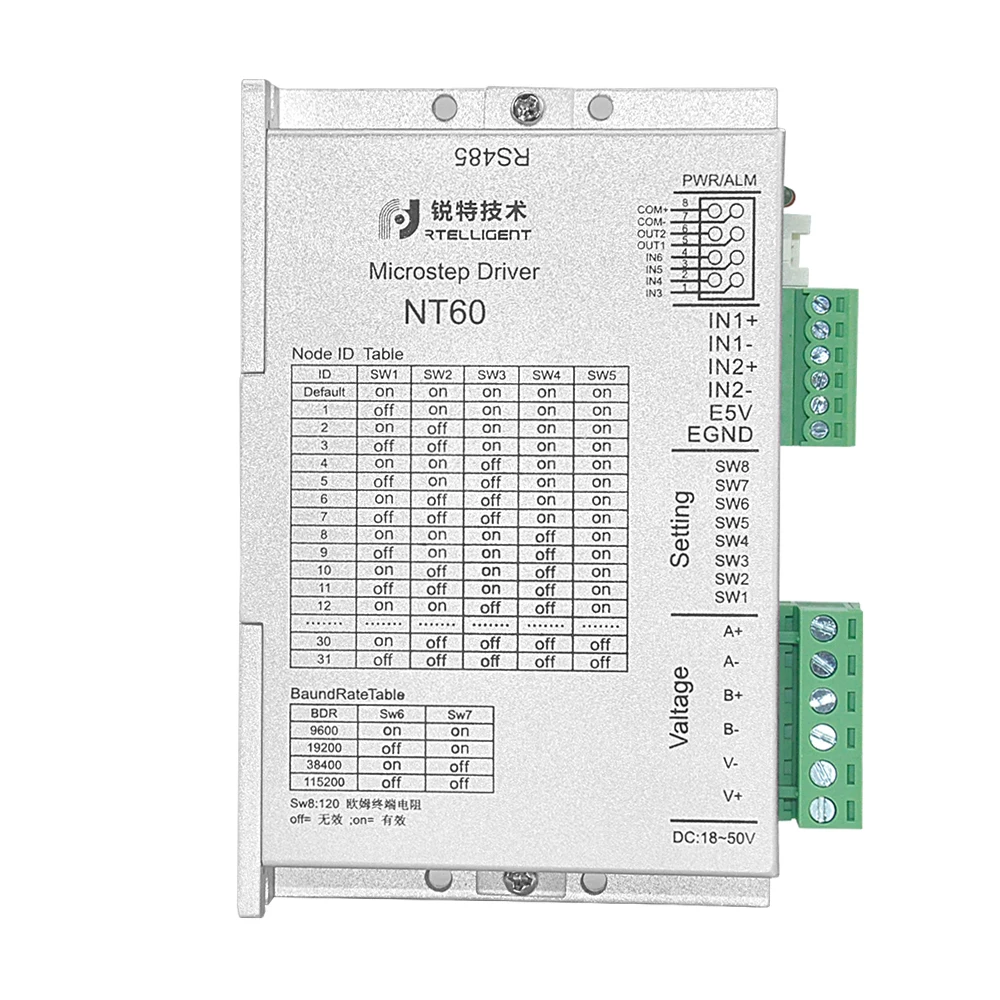
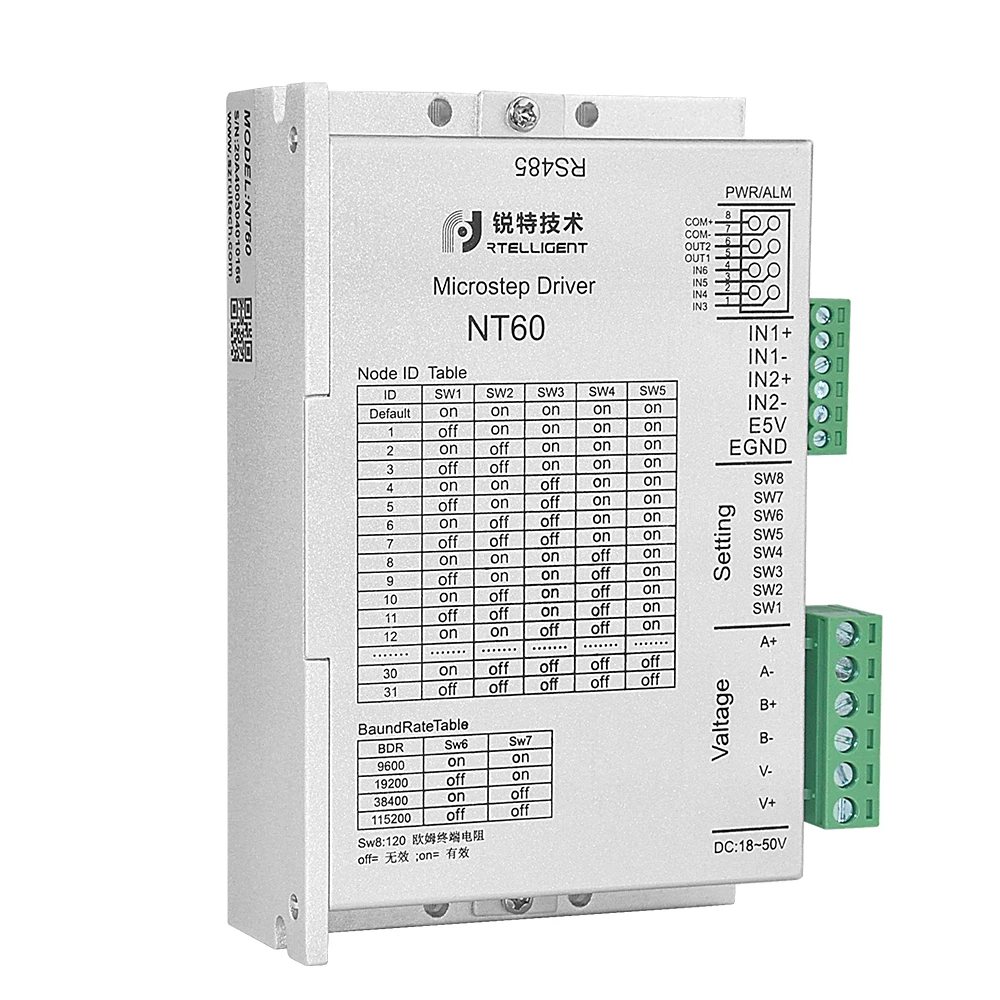
NT60-это высокопроизводительный Драйвер шагового двигателя с управлением шиной, который интегрирует интеллектуальную функцию контроллера движения со встроенными s-образными командами ускорения/замедления для самостоятельного настройки ускорения и замедления. Управление приводом и двигателем в режиме реального времени путем запуска протокола Modbus по сети RS485.
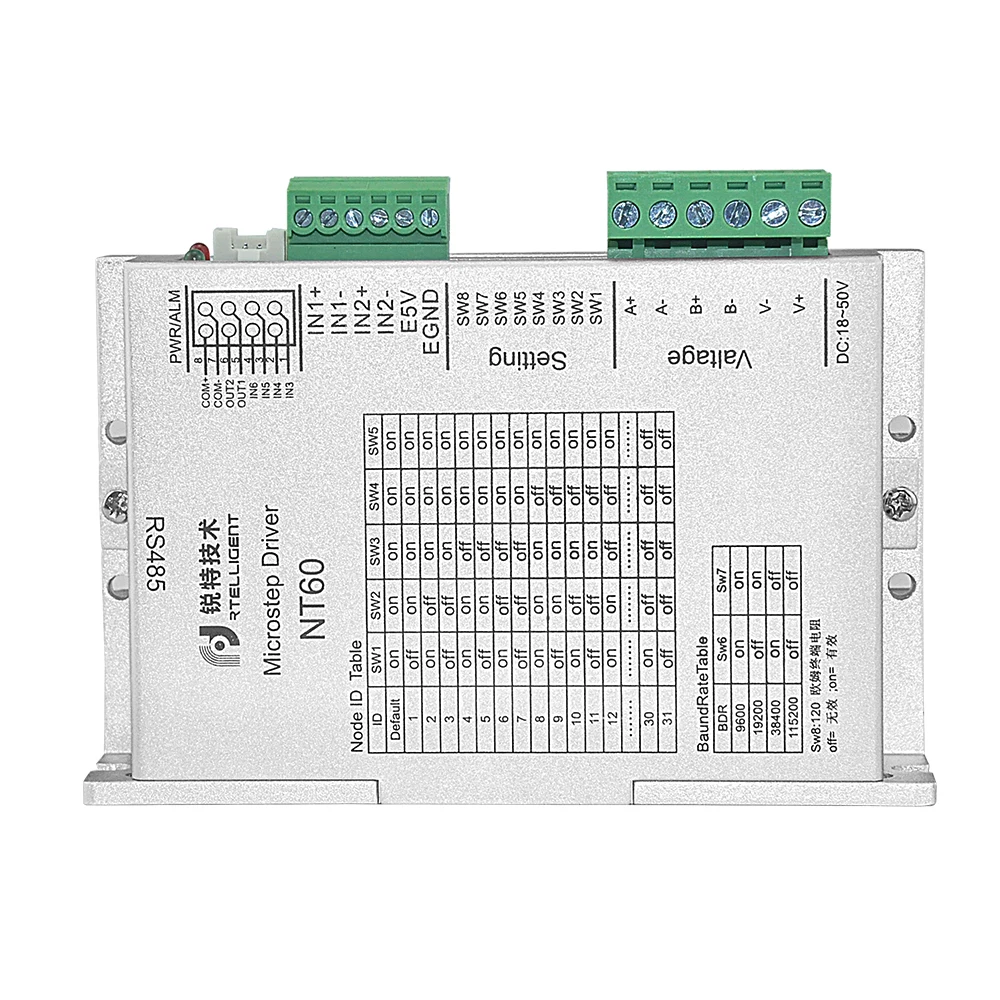
6-канальный оптически изолированный цифровой Входной сигнал: IN1, IN2 5V дифференциальные входы, также может быть подключен к 5V одиночный вход; IN3 ~ IN6 составляет 24В одиночный вход переменного тока, общий анод соединение
2 канала оптически изолированного цифрового сигнала, максимальное Выдерживаемое Напряжение 30 в, максимальный токовый или потянутый ток 100 мА, общее катодное соединение.
Источник питания: V + подключен к положительному полюсу источника питания постоянного тока, а V-подключен к отрицательному полюсу источника питания постоянного тока. Диапазон входного напряжения DC18 ~ 50 В.
Двигатель: Драйвер по умолчанию соответствует двухфазному шаговому двигателю, подключите красный, синий, зеленый и черный к A +, A-, B +, B-
Настройка DIP: SW1, SW2, SW3, SW4, SW5 set slave address, ON = 0, OFF = 1
Рабочий адрес = SW1 + SW2 × 2 + SW3 × 4 + SW4 × 8 + SW5 × 16
SW6, SW7 Установите скорость передачи данных (см. Стол для трафаретной печати для получения подробной информации). SW8 является эффективным сопротивлением клеммы, как правило, не циферблат для короткой дистанционной связи.
Дифференциальный Интерфейс 5 В: может использоваться как энкодер с замкнутым контуром и импульсный сигнал 5 В + направление (при использовании входного сигнала 24 В, подключите резистор 2K для ограничения тока во внешней серии).
Интерфейс порта IO 24 В: этот порт имеет 4 канала общего 24В ввода, два канала общего выхода 0 В, функция может быть выбрана в программном обеспечении отладки.
2. Введение функции привода
Функциональная ступенчатая шина Rtelligent объединяет три режима управления: pulse + direction, IO, 485 communication. В том числе, ввода-вывода включает в себя скоростной режим запуска и остановки плюс направлении, скоростной режим переднего и заднего хода, 16-сегмент измеритель скорости, 16-сегмент позиции стол, фиксированной длины пробежки, нулевой возврат, ограничение, аналоговый режим скорости (регулирование скорости потенциометра), аналоговый режим и режим крутящего момента.
(1) параметры импульса + направления:
В1, ин2 подключены к входу направления импульса, а IN3 и IN4 также могут быть установлены в направлении импульса. Есть разница в проводке между ними, первый подключен к сигналу 5 В, а второй подключен к сигналу 24 В.
IN3 уровень доступа сигнальный двигатель вперед вращение, IN3 отключение IN4 уровень доступа сигнальный двигатель обратное вращение. Параметры скорости и проводка такие же, как старт и стоп плюс реверс.

(5) 16-сегмент позиции установки таблицы:
Регистры P125 ~ P155 устанавливают ход двигателя, и P72 устанавливает скорость. Метод запуска такой же, как и спидометр.


(6) Настройка фиксированной длины пробежки:

(7) возврат к нулю настройки:
Параметры режима homing доступны только в новейшей отладке программного обеспечения NTConfigurator 1.0.0.44. Старое программное обеспечение для отладки необходимо изменить, написав значение в коде функции 06.


(8) ограничение:
Предел-это датчик PNP по умолчанию, И полярность порт ввода-вывода должен быть изменен в тех случаях, когда тип NPN датчик подключается (green в мелкий горошек черного цвета и включением/выключением питания перезапуска понадобится, чтобы увидеть эффект).

(9) Настройка режима аналоговой скорости:
Подключите Внутренний провод драйвера к потенциометру, а затем установите такие параметры, как смещение P272, фильтр P273, мертвая зона P274, нулевой дрейф P275, p276 3,3 V Соответствующая скорость и так далее.
Дрейф нуля:Относится к значению напряжения дискретизации драйвера относительно GND, когда входное напряжение аналогового канала равно нулю.
Офсетная печать:После корректировки значения нулевого дрейфа, соответствующее значение входного напряжения аналогового канала, когда напряжение выборки равно нулю.
Мертвые зоны:Когда напряжение выборки равно нулю, это соответствует интервалу входного напряжения аналогового канала.
Скорость окружающая Обстановка:Входная команда скорости при P276 3,3 V соответствующей скорости.
Скорость расчет:Фактическая скорость равна P277 отбора проб напряжение делится на 3300 раз P276 3,3 V соответствующую скорость.

(10) Аналоговое положение:

В режиме приложения для отслеживания аналогового положения другого пускового сигнала или включения пускового сигнала нет. Аналоговое входное напряжение изменяется потенциометром и другими устройствами, чтобы следовать аналоговому положению. Поскольку в сигнале включения/запуска нет внешнего сигнала, положение аналогового входа может быть изменено сразу же после включения питания. Остерегайтесь возникшего столкновения!

Регистр P214 215 устанавливает команду положения двигателя, и регистр P216 217 проверяет текущее положение.
(11) Настройка режима крутящего момента:

Режим крутящего момента должен обновить программу до NT60_V230.ehex в соответствии с замкнутым циклом двигателя.
Внутренний режим применения 26 реализует вращение крутящего момента вперед путем настройки IN_multi-step управления скоростью 2 и IN_multi-step управления скоростью 3 для обратного крутящего момента. Параметры крутящего момента:
P165 крутящий момент, блок мА
P75-P77 ускорение, замедление, скорость
Время удержания крутящего момента P219, когда блок ms установлен до 0, это означает, что крутящий момент сохранен. После того, как крутящий момент достигнет времени удержания, состояние двигателя будет контролироваться P220, в автономном режиме или заблокировано положение. P220 = 0, двигатель находится в автономном режиме; P220 = 1, положение двигателя фиксирует вал.








Смотрите так же другие товары:














